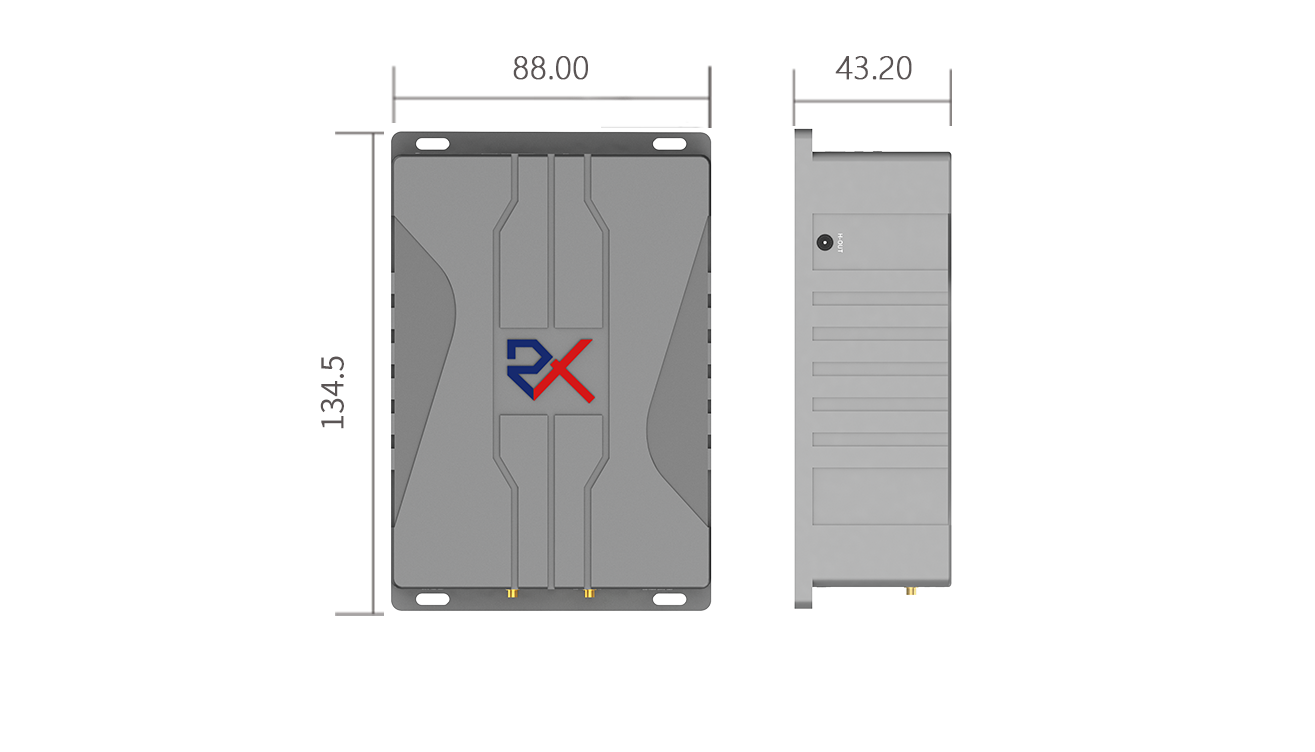
移动机器人控制器
复合机器人底盘专用控制器/XMC400
XMC400是为复合移动机器人底盘设计的专用控制器,适用于双舵复合型车体,内置单/双激光导航、二维码导航、反光板导航以及UWB等多种导航算法,支持视觉避障和绕障。XMC400内置水平和垂直IMU,自带丰富的I/O资源和各种通讯接口,支持Modbus、CANopen和以太网等通讯协议,支持WIFI6(只支持车体调试),具备CE认证。XMC400配套的机器人应用配置软件,提供功能强大的图形化实施能力,帮助用户快速的完成移动机器人的配置和现场应用。